Attenzione: questa pagina non e' ancora finita! Il lavoro e' ancora in corso.
Non mi assumo nessuna responsabilita' per danneggiamenti, perdita di dati
o danni personali come risultato diretto o indiretto dell'uso delle
informazioni contenute in queste pagine.
Questo materiale e' fornito cosi' com'e'
senza nessuna garanzia
implicita o esplicita.
|
|
Attenzione: questa pagina non e' ancora finita! Il lavoro e' ancora in corso. |
|
|
Abstract |
AbstractQuesta pagina spiega come modificare il modulo brain & vision di I-droid01, distribuito in Italia ba DeAgostini e come riutilizzarla nei tuoi progetti. Il modulo di I-droid01 (ora scheda ARM) e' basato su un microprocessore Freescale MC9328MXL, sulla scheda ci sono inoltre una RAM da 16MB e una Flash da 16MB per immagazzinare il firmware. Vedremo come costruire un kernel Linux per questa scheda, come collegarla alla Linux box, come caricare il file immagine nella Flash e come bootare. Alla fine dovremmo avere una nuova Linux box nella scheda stessa. Test preliminare
La scheda che tieni in mano e' un concentrato di potenza in grado di
fare qualunque cosa tu possa immaginare (e anche di piu'): e' basata
su un microprocessore Freescale MC9328MXL, un microprocessore ARM con
un clock a 150MHz, equipaggiato con 16MB di RAM e 16MB di Flash.
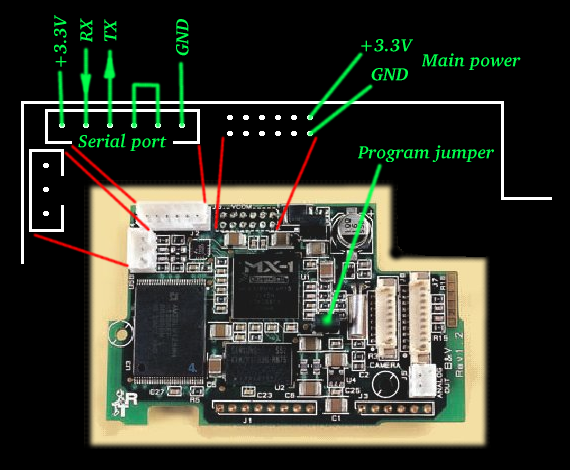
1) Collega il convertitore RS232-TTL alla linea seriale come mostrato in figura. I pins 4 e 5 sul connettore seriale sono i segnali RTS e CTS, per il momento non abbiamo bisogno dell'handshake quindi collegali tra di loro. 2) Collega il lato RS232 del convertitore RS232-TTL alla tua Linux box utilizzando un cavo pin to pin (in questo esempio /dev/ttyS0). 3) Chiudi il jumper di programmazione al centro della scheda ARM. 4) Avvia miniterm, in questo momento non ci interessa la velocita' del collegamento, quindi digita: $ miniterm -d /dev/ttyS0
5) Alimenta la scheda ARM con un alimentatore stabilizzato a 3.3V. Attenzione la tensione deve essere molto precisa, se usi un classico alimentatore a 5V puoi distruggere la scheda. I microprocessori ARM necessitano di un'alimentazione a 3.3V, se non hai una sorgente stabilizzata a 3.3V puoi pensare di cannibalizzare un alimentatore per PC e utilizzare l'uscita a 3.3V per alimentare la scheda. In questo caso ricordati di caricare l'uscita a 3.3V dell'alimentatore con una resistenza da 5.6ohm o meno per evitare che l'alimentatore si spenga per mancanza di carico. Misura la tensione in uscita con un voltmetro digitale prima di alimentare la scheda.
6) Premi il tasto
Ora sei pronto per il prossimo passo: scaricare ed installare una
toolchain per microprocessori ARM, scaricare e compilare un bootloader,
caricarlo sulla scheda, giocare un po' con esso, scaricare e
compilare il kernel di Linux, caricare il kernel di Linux sulla scheda,
caricare il filesystem, caricare altri sfronzoli, riavviare... La toolchainCi sono due modi per installare una toolchain per microprocessori ARM:
Primo
Secondo
1) Scarica gcc-3.2.3.tar.gz in
$ cd /usr/local/src
2) Installa gcc come compilatore C nativo:
$ mkdir gcc-3.2.3-build
$ make install (come root)
Attenzione: prima di installare gcc devi installare (o aggiornare) le binutils; io ho saltato questo passaggio perche' nel mio sistema le avevo gia' aggiornate per altri motivi, in caso di dubbio puoi consultare il manuale di gcc.
3) Scarica binutils-2.17.tar.gz
(o superiore) in
$ tar -zxvf binutils-2.17.tar.gz
$ make install
4) Ricompila gcc per ARM:
$ cd /usr/local/src
$ make install
5) Scarica newlib-1.15.0.tar.gz
in
$ tar -zxvf newlib-1.15.0.tar.gz
$ make install
Attenzione: io ho avuto qualche problema durante l'installazione
della newlib seguendo parola per parola questo processo: ho dovuto
creare alcuni link nel mio
Ora dovresti avere una toolchain per microprocessori ARM
funzionante.
Un altro esempio
$ cd
$ make install
$ cd $HOME/build
$ make install
$ cd $HOME/build
$ make install
Il bootloader
Qualcuno potrebbe chiedere:
Ci sono molti bootloader che puoi utilizzare nelle tue applicazioni
embedded, ecco qui una piccola lista:
Io sto' usando u-boot nei miei esperimenti, quindi questa pagina
illustrera come utilizzare questo bootloader con la scheda di
I-Droid01. 1) Crea un nuovo albero per i files ARM nella tua home directory:
$ cd
2) Scarica u-boot
in
$ bunzip2 u-boot-1.1.6.tar.bz2
3) Scarica la mia patch (la puoi rovare
nella sezione download) in
$ patch -p0 < u-boot-1.1.6-idroid-patch-0.02.diff
Questo modofichera' alcuni files di configurazione per permettere ad
u-boot di girare sulla ARM board.
#define CONFIG_SKIP_LOWLEVEL_INIT 1
#define CONFIG_SKIP_RELOCATE_UBOOT 1
4) Compila u-boot:
$ mkdir u-boot-1.1.6-build-arm
Ora dovresti avere una qualche immagine di u-boot nel tuo build tree.
5) Caricare u-boot.
Hai bisogno di mxldump
per caricare u-boot sulla scheda, vai alla software page e installalo,
quindi torna subito qui.
00220000C400400C01 ; CS0U
00220004C411110C01 ; CS0L
00221000C491020200 ; pre-charge command
08200000E4 ; special read
00221000C4A1020200 ; auto-refresh command
08000000E4 ; 8 special read
08000000E4 ; 8 special read
08000000E4 ; 8 special read
08000000E4 ; 8 special read
08000000E4 ; 8 special read
08000000E4 ; 8 special read
08000000E4 ; 8 special read
08000000E4 ; 8 special read
00221000C4B1020200 ; set mode register
08088C00E4 ; special read
00221000C481028200 ; set normal mode
Questa e' una serie di B-records spediti al firmware loader per
scrivere e leggere alcuni registri del microprocessore. Se vuoi puoi
scaricare raminit.raw qui.
$ cd u-boot-1.1.6-build-arm
Questa procedura eseguira' i seguenti passi:
Se tutto va bene il prossimo passo sara' installare il codice di u-boot nella memoria flash, in modo che u-boot rimanga residente sulla ARM board.
Installare u-boot
Prima di tutto devi ricompilare u-boot, quindi commenta queste due
righe in
#define CONFIG_SKIP_LOWLEVEL_INIT 1
#define CONFIG_SKIP_RELOCATE_UBOOT 1
Ora dovresti avere due versioni leggermente differenti di u-boot: la
prima e la stessa senza le due linee sopra. Chiameremo la prima
verione
$ mxlsync
MXL$ ...(continua)
Spegni la scheda ARM, rimuovi il jumper di programmazione e riaccendi
la scheda: u-boot dovrebbe partire. Linux kernelIl prossimo passa e' costruire, caricare ed eseguire il kernel di Linux; questo puo' essere un pochino complicato da fare e sicuramente lungo da spiegare, cosi' l'ho spostato in un'altra pagina completamente dedicata al kernel di Linux e al filesystem. Se sei interessato clicca qui. Board pinoutApplicando una tecnica di reverse engineering ho trovato la piedinatura completa della scheda, se sei interessato la puoi trovare qui.
DownloadPuoi scaricare tutti i files relativi al progetto ARM diretamente da qui.
Ricorda di applicare solo l'ultima patch disponibile ad un
codice sorgente pulito con lo stesso numero di versione, non
applicare mai piu' di una patch alla volta. Come applicare una patch
Per applicare o creare una patch segui questi passi: io assumo che
sia
Per creare la patch digita:
Per applicare la patch digita:
Per verificare la patch digita: LinksAlcuni link utili riguardo questo progetto:
FAQ
Q: ContattiSe hai delle domande, suggerimenti, problemi, etc. puoi contattami a questo indirizzo: bit.trapper@gmail.com Ultimo aggiornamento: 29 Dic 2012 |
Questo sito e' stato realizzato interamente con vim.
Grazie a tutta la comunita' open source, alla free software foundation
e chiunque scriva software libero.